
The mystery
I wanted to know some simple truths in life, such as who built the pyramids, why hasn't the United States converted to the metric system, will the Smiths ever make another studio album and why did Nikki Miller turn me down for the prom?
Some things in life are too complex to grasp. But, looking at my broken C1 Chaser on the ground perhaps there were a few things I could still learn? In the angle mode it kept dropping, and I had it too close to the ground, directly overhead and lost perspective. Not the smooth INAV experience I was hoping for.
So, as the glue was drying, yet again for this version of the plane I asked the smartest people I know, who happened to be on the INAV Fixed Wing Group what happened. Someone wrote in a nice reply that answered the question.

Level vs altitude
A perfectly level plane won't lose altitude, right? Or perhaps a better question is, what do you want? Do you want your plane to fly perfectly level or do you not want to lose altitude? Because a level flight usually is a flight that drops. When we first set up our flight controllers what we're asking is for the plane to fly perfectly level. And my flight controller was performing perfectly.
But, planes aren't exactly perfect, and they don't fly exactly efficiently. It has to do with the way that the air travels across the wing. The tendency is that at level flight many planes will sink. But, it really depends on the airfoil. Some planes are designed with a bit of reflex built in. But, most just sink when level.
2.5 is my magic number
To combat the loss of altitude we have to pitch the nose up ever so slightly to compensate. One of the first things I do when I get a new flight controller before I even begin soldering is to flash INAV. When it's flashed one of the very first steps is a calibration. I will teach the flight controller what the six axes are in my world. I find it best to do this on a desk and hold the flight controller perfectly still for each reading. I find that these are the six truths that the flight controller must learn. But, shouldn't you do this in a plane instead? It's like having a compass (not the same, but similar) that you mount in your car. If you mount it on your windshield at an angle, do you need to recalibrate your compass? No, because it will always know where north is, no matter how it's mounted.
My view is that straight up and straight down really aren't open for interpretation. Neither are the other 4 axes. The position of the flight controller may change, however. That's what we have to account for. When your flight controller has learned it's six truths it can make accommodations for its environment. You can mount it upside down, 90 degrees left or right yaw, or even 180 degrees. But we have to tell the flight controller that it's not mounted exactly as expected.
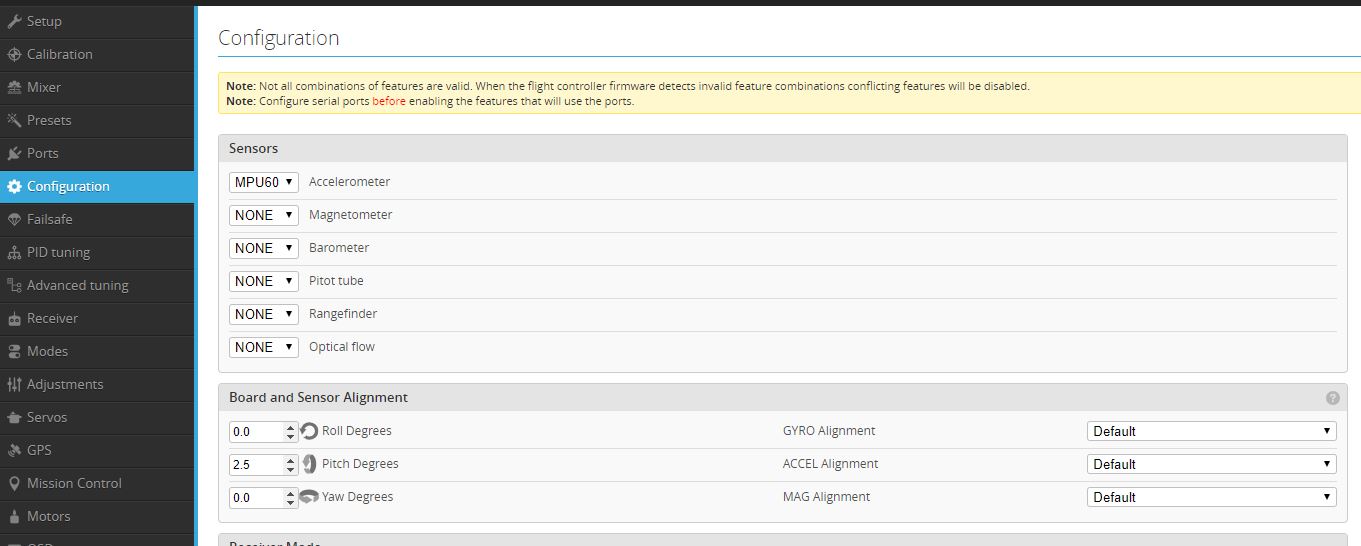
In the INAV Configurator, in the configuration tab on the top left, there are boxes where we tell the flight controller how it's mounted. This is where you can account for it being 90 or 180 degrees off yaw or upside down (180 degrees pitch). If I am not making any other pitch adjustments I change the number to 2.5 (positive). That doesn't automatically fix everything, but it's a very good place to start. If the plane still sinks in normal flight I can take it up a half a degree at a time. If the nose is up too high it will gain altitude too easily and may seem like the control surfaces have even less authority.
To answer a question people will have, yes, most of the time it works fine, or well enough to allow me to perform an autotune.
I don't want people reading this and thinking "I don't want to lose altitude and crash, why not give it 5, 10 or 15 instead?" If you want a real-world example while this isn't such a good idea, get on your bicycle and ride an 8% grade. 8% is a small number, right? You'll be huffing and puffing and grunting all the way up the hill. I have one near my home that's over 2km long By the time I'm at the top I can see the valley below,. The valley is where I start out at before the 8% climb. Little numbers make a big difference.
Play with it.
If the plane is still sinking, a bit, take the number up to 3. If it's not sinking but you're concerned about lift or authority over the control surfaces, drop it down to 2. If it's too off for your tastes, land the plane and don't fly it again until adjustments are made.
There is no right number for every plane. So, experiment, and be choosy about what works for you. I find that 2.5 helps get me to the point where I can autotune the plane. Every time you change this pitch number in the configurator you will need to do a new autotune and possibly an auto trim of the plane.
We'll be working on a master-tune document, but I wanted to get this out there right away.
I will give you some other clues as well.
Your plane really should fly well in manual. If it doesn't and you're not up to snuff on tuning skills you need to ask for help. You have to fight to get the CG right and the control surfaces working to keep the plane in the air. And if you can get a gr a good eat flying experience with your plane in manual the rest will fall into place.
If your plane flies well in manual but not well in stabilized modes you should perform an autotune. Hold onto your hat because for a short period of time the plane will fly even worse. Then it will fly much better over time and you will really like the results. Be sure to save.
If you are in the stabilized modes and you have no authority to speak of you are most likely tail heavy. A quick way to tell is to put the plane in manual, get it up high and point the nose at the ground. If the nose balloons back up with speed you are tail heavy.
Fine tuning is an art in INAV. Be very picky about what you like and work on improving your plane for a good experience.




No comments:
Post a Comment